Page Not Found
Page not found. Your pixels are in another canvas.
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
About me
This is a page not in th emain menu
Published:
Published:
I am excited to announce that I have accepted my admission offer into the Robotics area of the Electrical and Computer Engineering Master’s degree program at the University of Michigan, Ann Arbor!
Published:
I am happy to become The Valedictorian of Electromechanical Systems Engineering Technology at California State Polytechnic University, Pomona!
Published:
New Milestone: Tau Beta Pi - The Engineering Honor Society - CA Nu Chapter
Published:
Ongoing personal project exploring robotic arm design and prototyping for future manipulation research and development.
Published:
Personal robotics project focused on a multi-terrain hexapod platform with custom mechanical design, embedded control, and locomotion development.
Published:
Designed, prototyped, and tested automation components for robotic tool changing, docking, and embedded control during a summer internship at PACCAR.
Published:
Skills: ROS, Rviz, Gazebo, PyTorch, TensorFlow, U-Net, OpenCV, Python, C++, Linux, Bash/Shell Scripting, Git, Docker, Microcontroller, SolidWorks, 3D printing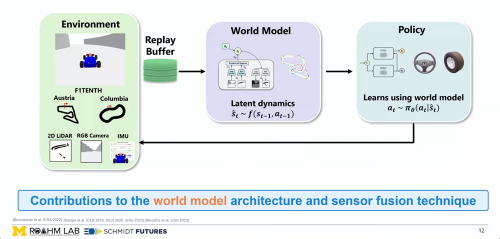
Published:
Skills: ROS, ROS2, Rviz, Gazebo, PyTorch, TensorFlow, U-Net, OpenCV, Python, C++, Linux, Bash/Shell Scripting, Git, Docker, Microcontroller, SolidWorks, 3D printing
Published in Submitted to IEEE International Conference on Robotics and Automation (ICRA), 2024
Multimodal world models for zero-shot policy transfer in multi-agent autonomous racing.
Recommended citation: Shrestha, E., Wan, H., Do, T., Rawal, M., Singh, S., & Vasudevan, R. (2024). Lucid Dreamer: Multimodal World Model for Zero-Shot Policy Transfer in Multi-Agent Autonomous Racing. Submitted to IEEE International Conference on Robotics and Automation (ICRA). https://scholar.google.com/citations?view_op=view_citation&hl=en&user=UkNYB_QAAAAJ&citation_for_view=UkNYB_QAAAAJ:u5HHmVD_uO8C
Published in Preparation toward Conference on Robot Learning (CoRL), 2024
Model-based reinforcement learning for robust autonomous maritime navigation in dynamic environments.
Recommended citation: Shrestha, E., Do, T., Wakevainen, K., Song, J., & Skinner, K. (2024). Intelligent Navigation of Autonomous Maritime Robots. Preparation toward the Conference on Robot Learning 2025 /files/Heron_USV_RL_Final_report.pdf
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.