
Monocular 3D Object Detection in Foggy Conditions
Published:
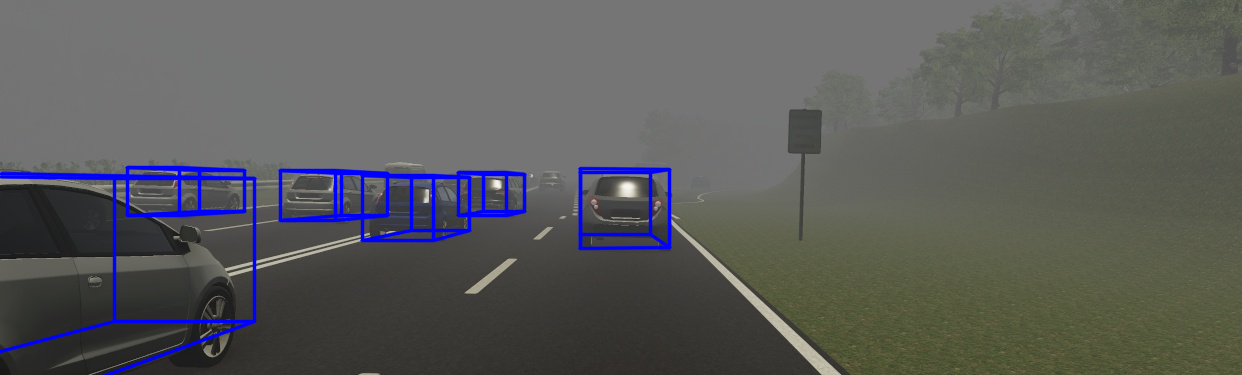
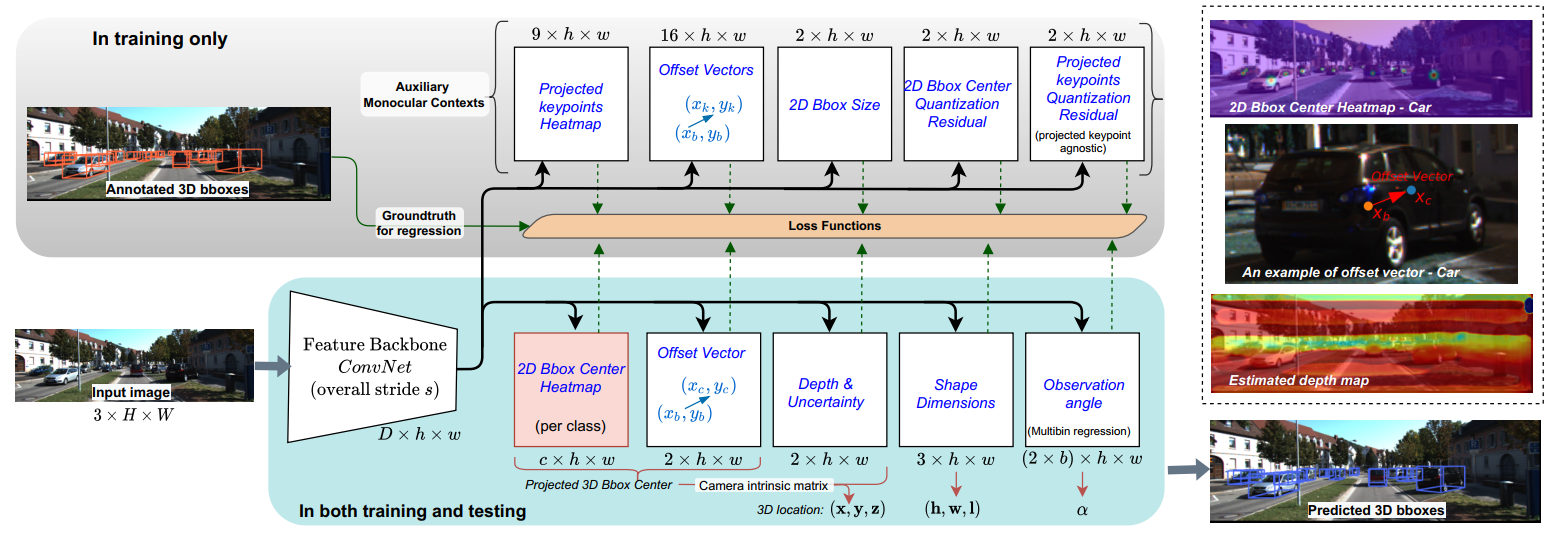
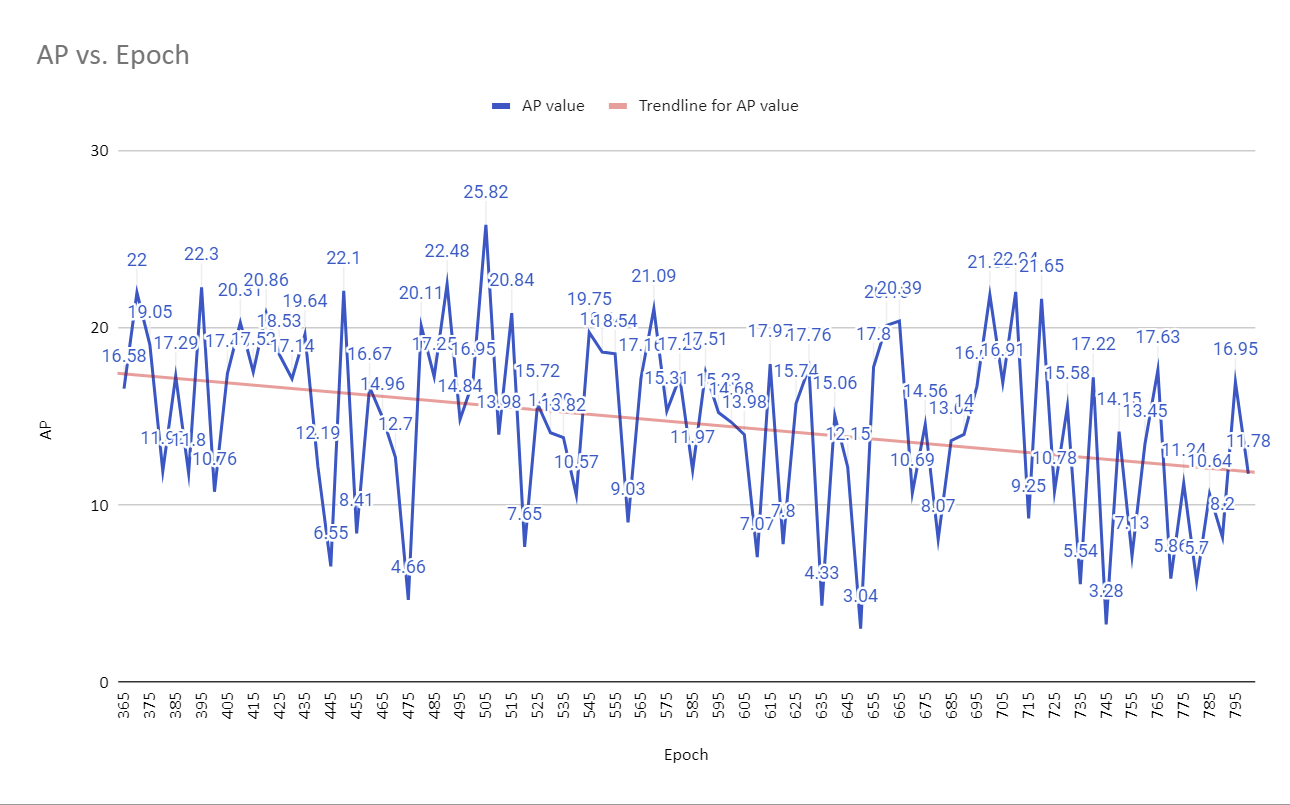
Brief: This paper investigates improvements in monocular 3D object detection, which is crucial for autonomous vehicles. The focus is on increasing detection accuracy and robustness in various weather conditions, especially in fog. The study uses the MonoCon model, incorporating transfer learning, image augmentation, and pre-processing techniques to enhance visibility in foggy conditions. It addresses specific challenges like fluctuating Average Precision (AP) values and the inefficient detection of distant or small vehicles in fog by revising the evaluation strategy and using targeted image processing.
Role: Robotics Researcher
Result
- Implemented and fine-tuned advanced image augmentation and pre-processing strategies to boost detection accuracy and robustness under varied weather conditions, ensuring that the system can operate effectively in real-world scenarios involving environmental uncertainties.
Skills: Leadership, Machine Learning (PyTorch), Python, Linux, Bash/Shell Scripting, Git, Docker
Contributors' Acknowledgement: 2gunsu/monocon-pytorch, Minghan Zhu, Xirong Liu, Rahul Swayampakula