Hexapod Robot for Multi-Terrain Exploration
Published:
Brief: This is my personal project. It is still in development.
Role: Robotics Researcher
Process
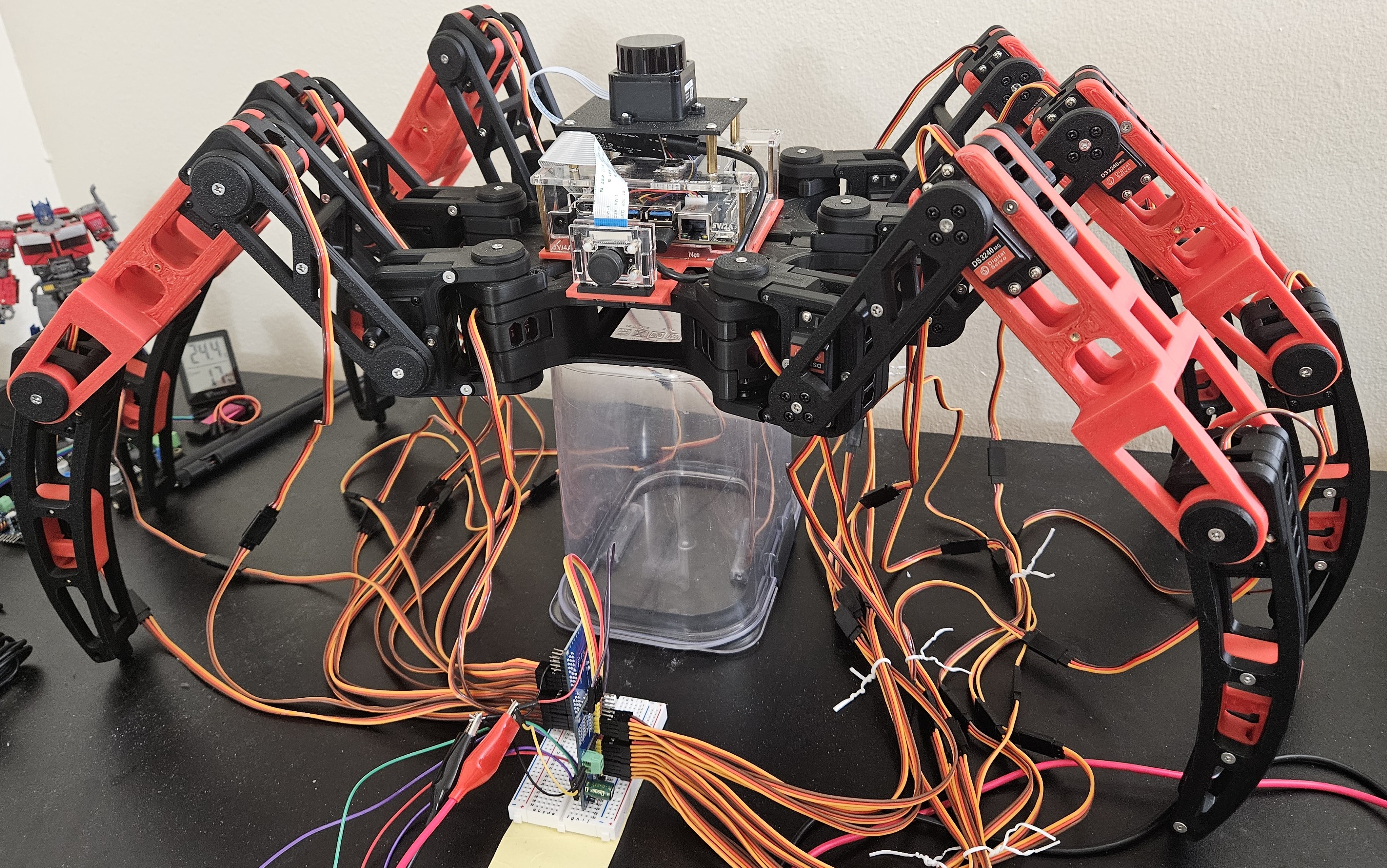
- Developing a Hexapod Robot as an independent project, based on a design from Aecert Robotics, with custom modifications to enhance functionality. I added an extra metatarsus to each leg and am working on stabilizing the robot using a 3-joint leg design.
- Managed the full hardware setup, including battery, electrical systems, and mechanical components. I 3D-printed and assembled the entire robot, designing custom parts to accommodate additional sensors and structural modifications.
- Focused on integrating advanced robotics principles, such as mechanical design, locomotion algorithms, and sensory feedback systems, to improve the robot’s adaptability and performance in multi-terrain environments.
- Leveraging my mechatronics and hardware expertise to create a robust, autonomous system capable of navigating complex terrains, with an emphasis on mechanical stability and adaptability.
[GitHub][UMich Post]
Skills: C++, Git, Debugger, Microcontroller, GPIO, PWM, I2C, SolidWorks, 3D Printing
Contributors' Acknowledgement: AecertRobotics