
Northrop Grumman Collaboration Project 2022-2023
Published:

Brief: Northrop Grumman Collaboration Project. This project is one-year long so I hope you enjoy it while scrolling through my stories!
The project was to develop the UAV and UGV to meet Northrop Grumman requirements, starting from Aug 2022 and final demo was scheduled around the end of May 2023.
There are many requirements but here are the main points:
- The UAV will scout around the area of 2000ft in diameter and search for a wildfire and an injured hiker. Then it will drop a first-aid package near the hiker and notify the Ground Control Station (GCS) about the hiker's and wildfire's coordinations.
- The GCS will send the UGV to pick up the injured hiker and send another drone vehicle, which was developed by Cal Poly SLO team to put out the fire.
Role: Embedded Software Engineer of UAV and UGV teams
Result
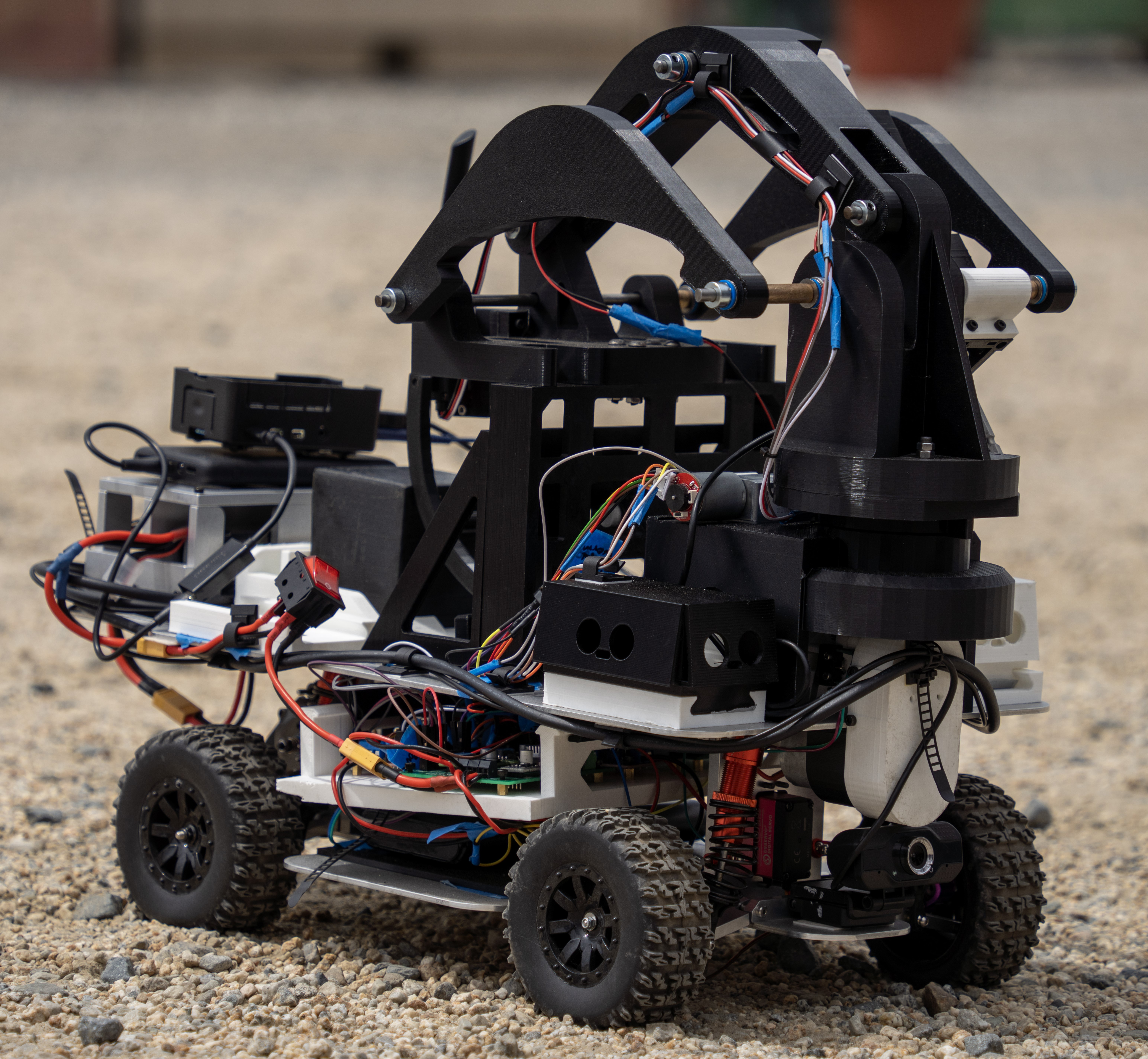
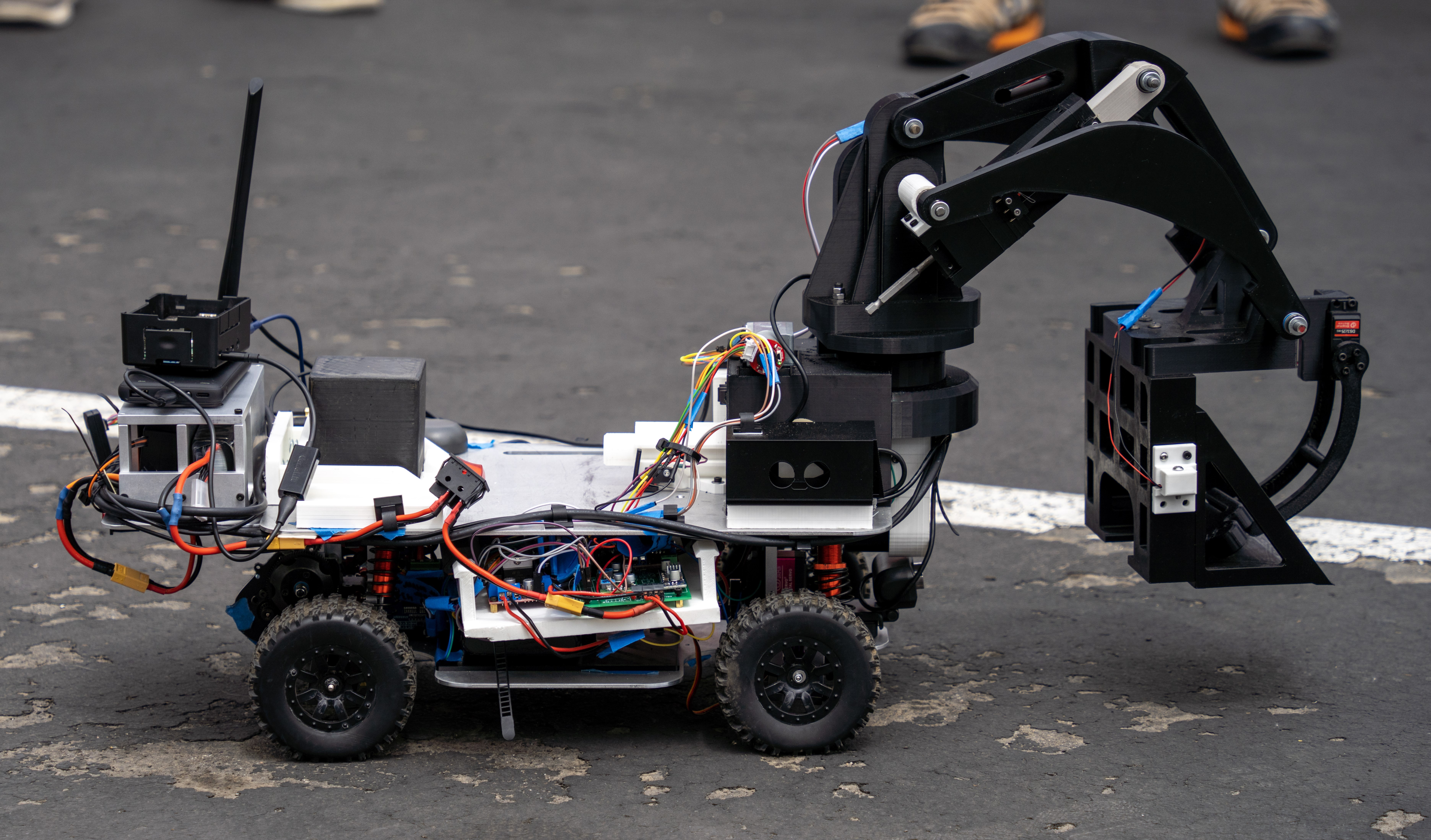
UGV Development
NGCP Demo




- Developed Python scripts for the Jetson Nano to implement autonomous in-flight control on the Pixhawk controller. Successfully met Northrop Grumman’s demonstration requirements by autonomously piloting a UAV at 200 feet for 10 minutes, conducting reconnaissance to identify wildfires and locate injured hikers.
- Programmed embedded software in Embedded C for the STM32 microcontroller and developed ROS Python scripts to enable wireless communication between two Raspberry Pi systems. This facilitated remote control of a UGV over a 700-foot range, successfully achieving Northrop Grumman’s objective of safely transporting an injured hiker to the Ground Control Station.
- Presented our work at the Preliminary Design Review meeting at Northrop Grumman’s facility in Palmdale, CA, detailing the technical solutions and outcomes of the autonomous UAV and UGV systems for real-world search and rescue operations.
Skills: ROS, C, C++, Python, Linux, Bash/Shell Scripting, Git, Debugger, Microcontroller, GPIO, ADC, PWM
Contributors' Acknowledgement: My NGCP UAV and UGV teams